移動ロボットの動作計画
複数台の移動ロボットを使って, 動作計画(モーションプランニング)を行っています. マルチロボットシステムでの干渉回避, 協調動作計画, 単一方向・双方向でのデッドロック回避制御などに関する研究も行っています.
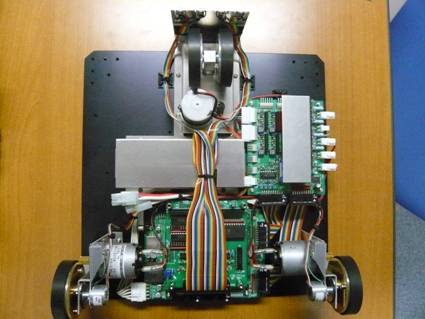
図はSH4搭載ボード搭載モデル(日本システムデザイン(株)製)
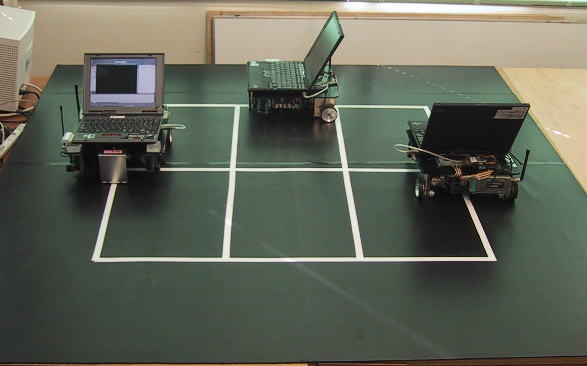
複数台移動ロボットの衝突回避制御
岡山大学大学院 自然科学研究科 産業創成工学専攻 知能機械システム学講座
複数台の移動ロボットを使って, 動作計画(モーションプランニング)を行っています. マルチロボットシステムでの干渉回避, 協調動作計画, 単一方向・双方向でのデッドロック回避制御などに関する研究も行っています.
図はSH4搭載ボード搭載モデル(日本システムデザイン(株)製)
複数台移動ロボットの衝突回避制御